一起玩转树莓派(8)——树莓派模数/数模转换实践(2)
一起玩转树莓派(8)——树莓派模数/数模转换实践(2)
在上一篇博客中,我们介绍了在树莓派中使用模数转换芯片的基本方法,如果你对上一篇博文中介绍的内容已经有了深入的理解,那后面的应用试验对你来说将非常容易。如果不是,那么我建议你先将之前介绍的内容在研究一下:
https://my.oschina.net/u/2340880/blog/5142788
现在,如果你决定继续本篇博客的学习,那么我认为你已经了解了PCF8591芯片的基本用法,明白了PCF8591的接线方式,I2C总线的基本工作原理以及PCF8591的设置命令的意义和读数据的方法。
一、读取外部传感器的模拟信号
在本系列博客的上一篇文章中,我们通过读取PCF8591实验模块自带的可调节电压输出、光敏传感器和热敏传感器实现了对当前环境信息的的读取,除了可以读取当前设置的输出电压外,我们还可以获得当前的环境的温度和亮度。PCF8591实验模块自带的传感器可以让我们很方便的进行实验,其实在实际应用中,更多时候我们需要从AIN0到AIN3引脚来获取外接传感器的模拟信号。现在,我们尝试下通过AIN0和AIN1两个输入引脚来获取外接光敏和热敏传感器的数据。
1.关于实验所使用的传感器
我们这里的小实验将使用光敏和热敏传感器。
光敏模块
光敏传感器能够感应光纤的明暗变化,其实现此功能的核心在于光敏电阻,只做光敏电阻的常用材料有硫化镉、硫化铝等。这些材料在特定波长的光波照射下,其阻值会产生明显的变化。本次实验,我们使用的光敏传感器模块如下图所示:
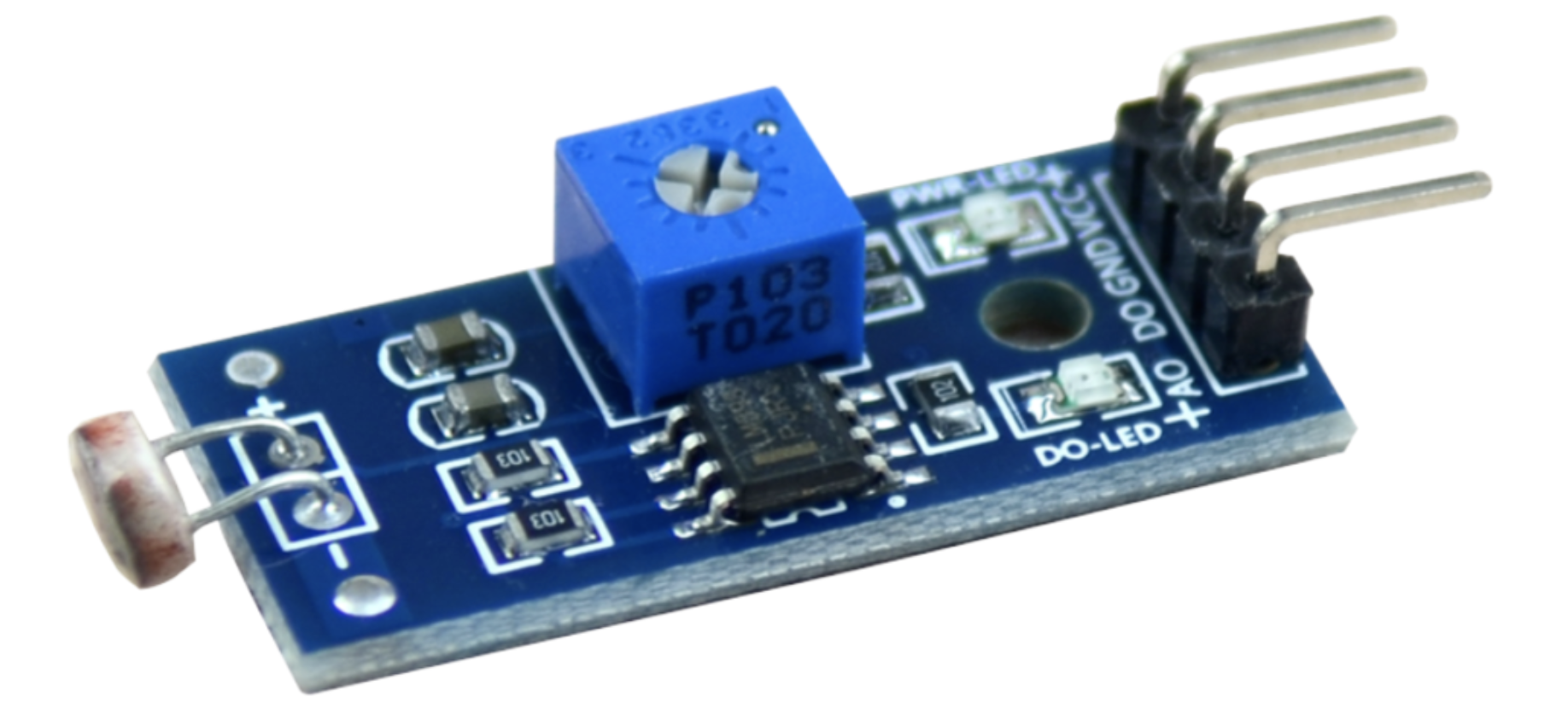
可以看到,此模块的核心是一个光敏电阻,提供了可调节灵敏度的功能单元和两个LED指示灯,其中一个LED是电源指示灯,接通电源后会亮,另一个LED灯是电平指示灯,当光亮达到阈值时,输出引脚输出低电平,此LED灯亮,当光亮度较暗时,输出引脚输出高电平,此LED灯不亮。我们再看此模块的4个引脚:
VCC:电源引脚
GND:接地引脚
DO:数字信号输出引脚(高低电平)
AO:模拟信号输出引脚
热敏模块
本次实验我们使用的热敏模块的功能与上面将的光敏模块类似,如下图所示:

此热敏模块同样包含两个LED指示灯、灵敏度调节单元和4个引脚,引脚如下:
VCC:电源引脚
GND:接地引脚
DO:数字信号输出引脚(高低电平)
AO:模拟信号输出引脚
2.实验连线
本次实验,我们使用PCF8591读取光敏和热敏传感器的模拟信号,将其转换成数字信号被树莓派程序处理,同时,我们使用树莓派的GPIO端口来读取传感器本身输出的数字信号,首先,我们先确定要使用的PCF8591的输入引脚和要使用的树莓派GPIO引脚。
PCF8591输入引脚使用:AINO和AIN1,其中AINO读取光敏模拟信号,AIN1读取热敏模拟信号。
GPIO输入引脚使用:GPIO17和GPIO18(BCM编码方式),其中17引脚读取光敏数字信号,18引脚读取热敏数字信号。
PCF8591连线:
| PCF8591 | 树莓派功能引脚 |
|---|---|
| SCL | SCL |
| SDA | SDA |
| GND | GND |
| VCC | 5V |
光敏传感器:
| 光敏传感器 | 树莓派/PCF8591 |
|---|---|
| VCC | 树莓派3.3V |
| GND | 树莓派GND |
| DO | 树莓派GPIO11(物理引脚) |
| AO | PCF8591 AIN0 |
热敏传感器:
| 热敏传感器 | 树莓派/PCF8591 |
|---|---|
| VCC | 树莓派3.3V |
| --- | --- |
| GND | 树莓派GND |
| --- | --- |
| DO | 树莓派GPIO12(物理引脚) |
| --- | --- |
| AO | PCF8591 AIN1 |
| --- | --- |
连线最终如下图所示:
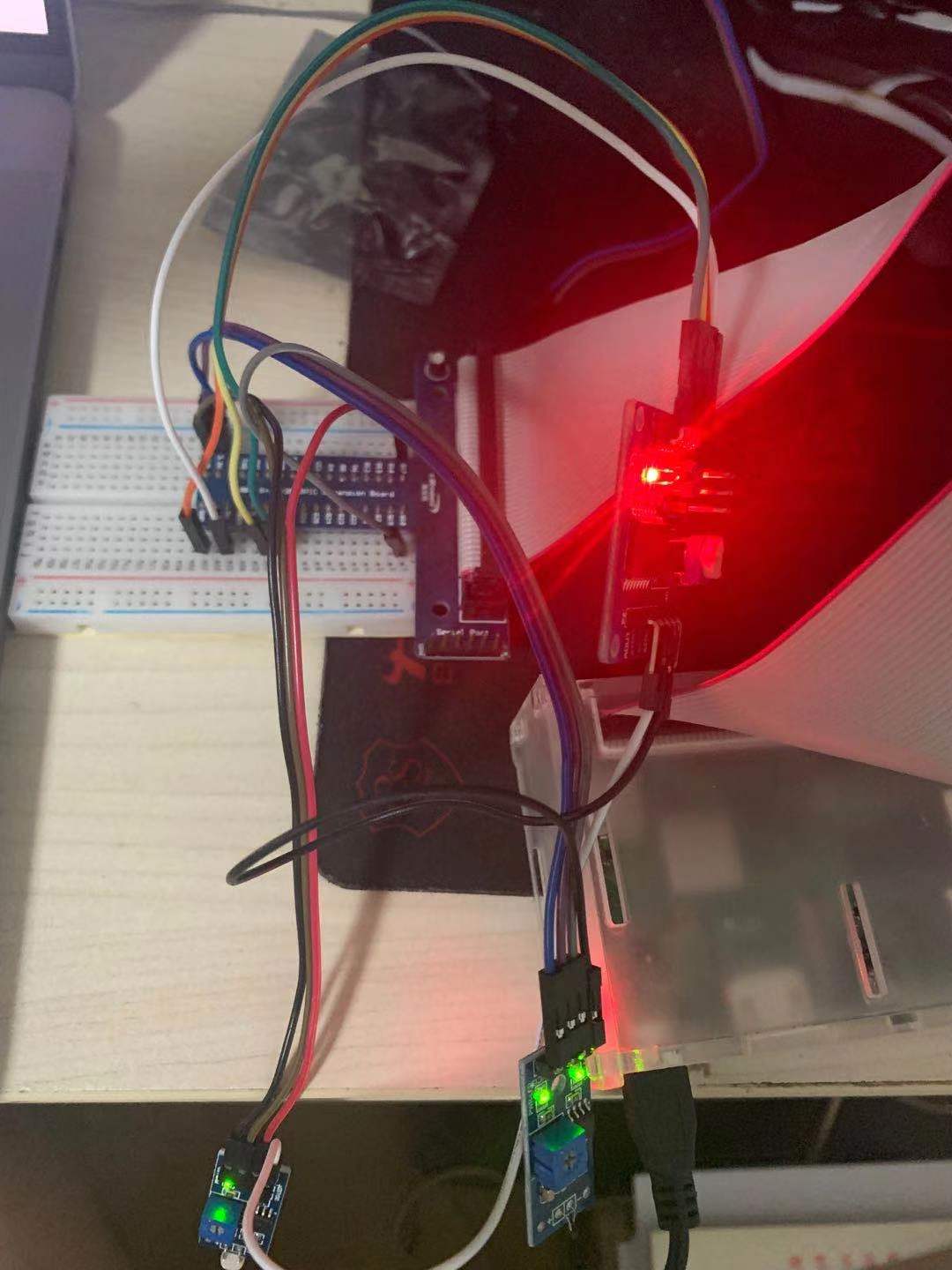
和之前相比,我们这次直接在树莓派上连接了3个元件,连线也复杂了很多,只要按照上面的表格,注意引脚的正确即可。
3.编写程序
步入正题,先上代码:
1 | #coding:utf-8 |
上面的代码有着比较详尽的注释,这里我们无需多说,在树莓派上运行此代码,即可观察到控制台的数据输出。
二、使用操纵杆外设控制圆球移动
如果你顺利完成了上面的实验,先别急着庆祝,你会发现,和本系列前面几篇博客的内容较比,到目前为止我们并没有介绍新的知识,同时也没有做什么新颖的事情。的确如此,但是通过上面实验的练习,可以帮助你更深入的理解数模/模数转换的应用场景,并且让你能够更加灵活的对I2C总线与通用GPIO串口结合进行使用。下面我们要来做一些好玩的事情了,不知道你小时候是否有玩过“大把机”,这是一种摇杆游戏机,摇杆可以朝上下左右4个方向转动,也可以从中间按下。通常,上下左右用来控制游戏人物的行动方向,按下用来进行人物跳跃。现在,我们要来做一个简单的游戏,为树莓派连接操纵杆,控制游戏程序页面上圆球的行为,其中方向控制圆球的移动,按下操纵杆则使圆球变色。
此实验所使用的操纵杆如下图所示:

可以看到,此元件有5个引脚:
GND:接地引脚
+5V:5V电源引脚
VRX:横向坐标模拟信号输出引脚
VRY:纵向坐标模拟信号输出引脚
SW:按钮数字信号输出引脚
操作杆内部实际上封装了双向的电阻器,其阻值会根据摇杆的方向变动产生变化,从而影响引脚信号的产生变化。
1.进行连线
我相信,现在连线对你来说应该是最简单的工作了。操纵杆有模拟信号输出同时也有数字信号输出,我们依然需要结合PCF8591与树莓派GPIO一起使用。关于PCF8591的接线上面有介绍,这里不再重复。操作杆的接线方式如下:
| 操纵杆 | 树莓派/PCF8591 |
|---|---|
| GND | 树莓派GND |
| +5V | 树莓派5.5V |
| VRX | PCF8591 AIN0 |
| VRY | PCF8591 AIN1 |
| SW | 树莓派GPIO 11(物理引脚) |
2.编写代码
对于本实验来说,有涉及到UI开发,我们依然采用Python自带的Tkinter库,其有很好的移植性,并且其提供了Canvas画布,我们可以灵活的渲染所需要的图形。示例代码如下:
1 | #coding:utf-8 |
上面的代码有些长,但是有详尽的注释,关于UI开发方面的内容不是我们本系列博客的重点,这里我们不做过多介绍。moveCircle函数是核心的圆球移动函数,内部通过边界判定逻辑可以确保圆球不会移动到视图界面外。changeColor方法用来修改圆球的颜色,这里我们让每次按键后在红绿颜色间进行切换。readX和readY函数我们无需做过多介绍了,其通过PCF8591的AIN0和AIN1来传输摇杆的横纵坐标信号。GPIO的相关操作我们也非常熟悉了,我们通过注册回调函数来监听操作杆按钮按下的行为。
在树莓派上运行上面的代码,尝试操作下,感受下使用操纵杆控制页面元素的喜悦吧。
3.一点扩展
观察上面的示例代码,你会发现,我们使用了一些临界值来作为触发方向动作的阈值,例如10,245这种,这是因为PCF8591是8位的数模转换模块,即其转换出的数字量在0-255之间(包括0和255),对于本实验来说,我们并没有让摇杆元件传输的模拟量发挥正真的作用,想一下,你是否能够根据操作杆的旋转程度来调整圆球移动的速度呢?动手试试吧!
专注技术,懂的热爱,愿意分享,做个朋友
QQ:316045346